
itgle.com
计算机构自由度时,若出现局部自由度,对其处理的方法是( )。A.计入构件数 B.计入运动副数 C.“焊死” D.去除
题目
B.计入运动副数
C.“焊死”
D.去除
相似考题
更多“计算机构自由度时,若出现局部自由度,对其处理的方法是( )。”相关问题
-
第1题:
计算机构自由度时,若出现虚约束,对其处理的方法是( )。A.计入构件数
B.计入运动副数
C.“焊死”
D.去除答案:D解析:计算机构自由度时,对虚约束的处理方法是先将其去除后,再确定机构的构件数及运动副数目。 -
第2题:
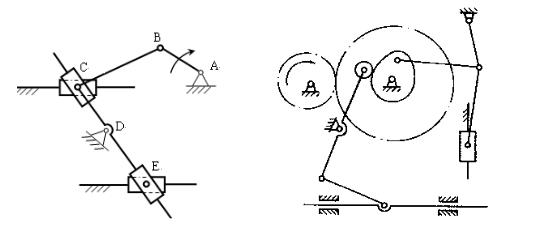
简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。

机构具有确定相对运动的条件是机构的自由度数目等于机构中原动件的数目。
即W=F>0。
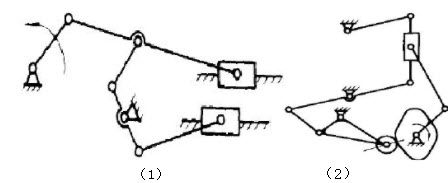
机构中,n=9,pL=12,pH=1
F=3n-2pL-pH=2=W>0,所以机构运动确定。
C处复合铰链,E处虚约束,F处局部自由度。
略 -
第3题:
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。

F.3n-2PL-PH=3×6-2×8-1=1
F处为虚约束;B处为复合铰链;G处为局部自由度。
机构运动确定。
略 -
第4题:
指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们是否具有确定的运动。
(1)C点有复合铰链
E点为虚约束
F=3×5-2×7=1
有确定的运动。
(2)图中有一处虚约束,一处复合铰链,一处局部自由度。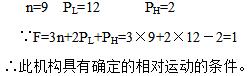
略 -
第5题:
计算机构自由度时,若计入虚约束,则机构自由度就会()
- A、增多
- B、减少
- C、不变
正确答案:B -
第6题:
机构中常出现一种与输出构件无关的自由度,称局部自由度。
正确答案:正确 -
第7题:
机构采用局部自由度会影响机构的输出运动的自由度。
正确答案:错误 -
第8题:
计算机构自由度时,若计入虚约束,则机构的自由度就会()。
- A、增多;
- B、减少;
- C、不变。
正确答案:B -
第9题:
计算平面机构自由度的公式为,应用此公式时应注意判断:(A)(),(B)局部自由度,(C)虚约束。
正确答案:复合铰链 -
第10题:
何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?
正确答案: 复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中, 其某些构件所能产生的局部运动并不影响其他构件的运动, 我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时, K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。 -
第11题:
单选题计算机构自由度时,若出现局部自由度,对其处理的方法是().A计入构件数
B计入运动副数
C"焊死"
D去除
正确答案: A解析: 暂无解析 -
第12题:
判断题局部自由度是与机构运动无关的自由度。A对
B错
正确答案: 对解析: 暂无解析 -
第13题:
计算下列机构的自由度,若有虚约束、复合铰链和局部自由度,需指出。

略 -
第14题:
计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出。

F处为复合铰链,H(或I) 处为虚约束,则
略 -
第15题:
计算下列机构的自由度,并指出存在的复合铰链、虚约束或局部自由度。
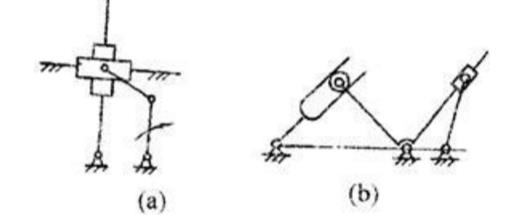
(a)
a中存在复合铰链,5个构件组成复合铰链,共有4个低副。
(b)
b中滚子为局部自由度。
略 -
第16题:
计算机构自由度时,若出现虚约束,对其处理的方法是().
- A、计入构件数
- B、计入运动副数
- C、"焊死"
- D、去除
正确答案:D -
第17题:
具有局部自由度的机构,在计算机构的自由度时,应当首先除去局部自由度。
正确答案:正确 -
第18题:
局部自由度是与机构运动无关的自由度。
正确答案:正确 -
第19题:
计算机构自由度时,若出现局部自由度,对其处理的方法是().
- A、计入构件数
- B、计入运动副数
- C、"焊死"
- D、去除
正确答案:C -
第20题:
在计算平面机构的自由度时,如果机构中两构件两点之间的距离保持不变,若用一根杆把这两点连接起来,则会带来()。
- A、是具体情况而定
- B、局部自由度
- C、复合铰链
- D、虚约束
正确答案:D -
第21题:
何谓机构自由度?平面机构的自由度如何计算?计算自由度要注意哪些事项?
正确答案: 机构相对于机架所能有的独立运动的数目为自由度。F=3n-2Pl-Ph。
注意:是否有复合铰链、是否有局部自由度、是否有虚约束。 -
第22题:
单选题在计算机构的自由度应除去不计()A局部自由度
B虚约束
C二者都除去
正确答案: B解析: 暂无解析 -
第23题:
单选题计算机构自由度时,若出现虚约束,对其处理的方法是().A计入构件数
B计入运动副数
C"焊死"
D去除
正确答案: C解析: 暂无解析










