itgle.com
线性定常系统的动态方程在转化为传递函数矩阵时,假设状态初值为零
题目
线性定常系统的动态方程在转化为传递函数矩阵时,假设状态初值为零
相似考题
参考答案和解析
更多“线性定常系统的动态方程在转化为传递函数矩阵时,假设状态初值为零”相关问题
-
第1题:
某系统的微分方程为,它是()。A、线性系统
B、线性定常系统
C、非线性系统
D、非线性时变系统
参考答案:A
-
第2题:
某系统的微分方程为x0(t)-x0(t)+x0^3=xi(t),则它是()。A.线性定常系统
B.线性系统
C.非线性系统
D.非线性时变系统
正确答案:C
-
第3题:
对()进行拉普拉斯变换,可以得到系统在复数域的数字模型称为传递函数。A.线性定常微分方程
B.非线性微分方程
C.非线性时变微分方程
D.线性时变微分方程
参考答案:A
-
第4题:
系统的微分方程为c(t)=r(t)cosωt+5,则系统属于()。A、离散系统
B、线性定常系统
C、线性时变系统
D、非线性系统
正确答案:D
-
第5题:
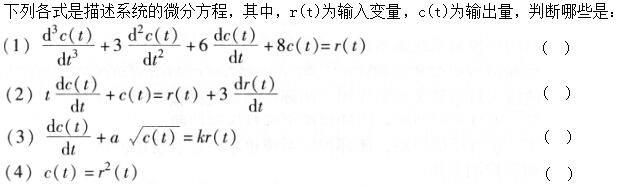
A.线性定常系统
B.线性时变系统
C.非线性定常系统
D.非线性时变系统答案:A,B,C,D解析:①方程是线性常微分方程,系统是线性定常系统。②方程中,只有系数是时间函数t,系统是线性时变系统。③方程中,有变量的开平方项,有系数是时间函数t,系统是非线性时变系统。④方程中,有变量的平方项,系统是非线性定常系统。 -
第6题:
回归方程总体线性显著性检验的原假设是模型中所有的回归参数同时为零。
正确答案:错误 -
第7题:
线性微分方程的各项系数为常数时,称为定常系统。
正确答案:正确 -
第8题:
线性定常系统有哪些基本性质?简述同频性在动态测量中的重要意义。
正确答案:线性系统具有频率保持特性的含义是输入信号的频率成分通过线性系统后仍保持原有的频率成分。如果输入是很好的正弦函数,输出却包含其他频率成分,就可以断定其他频率成分绝不是输入引起的。它们或由外界干扰引起,或由装置内部噪声引起,或输入太大使装置进入非线性区,或该装置中有明显的非线性环节。 -
第9题:
描写动态系统的数学模型是()
- A、微分方程
- B、代数方程组
- C、常系数线性微分方程组
- D、以上答案都不对
正确答案:A -
第10题:
传递函数的定义为:线性定常系统在零初始条件下,输出量与输入量之比。
正确答案:错误 -
第11题:
单选题dc(t)/dt+a根号[c(t)]=kr(t),则该描述系统微分方程可判断为()A线性定常系统
B线性时变系统
C非线性定常系统
D非线性时变系统
正确答案: A解析: 暂无解析 -
第12题:
单选题描述线性离散系统运动状态通常用()。A微分方程
B传递函数
C定常差分方程
D信号流图
正确答案: A解析: 暂无解析 -
第13题:
系统输入输出关系为,则该系统为()A、线性系统
B、非线性系统
C、线性时变系统
D、线性定常系统
参考答案:B
-
第14题:
线性定常连续系统状态方程的解由()部分相加组成。A一个
B两个
C三个
D四个
正确答案是:B
-
第15题:
适合于应用传递函数描述的系统是()。A、线性定常系统
B、线性时变系统
C、非线性时变系统
D、非线性定常系统
正确答案:A
-
第16题:
线性时不变连续系统的数学模型是()。A.线性微分方程
B.微分方程
C.线性常系数微分方程
D.常系数微分方程
正确答案:C
-
第17题:
Z变换的作用包括()。
- A、求解线性常系数差分方程
- B、求解非线性差分方程
- C、导出离散时间线性定常系统的脉冲传递函数
- D、导出离散时间非线性定常系统的脉冲传递函数
正确答案:A,C -
第18题:
dc(t)/dt+a根号[c(t)]=kr(t),则该描述系统微分方程可判断为()
- A、线性定常系统
- B、线性时变系统
- C、非线性定常系统
- D、非线性时变系统
正确答案:C -
第19题:
连续线性时不变系统的数学模型是()
- A、 线性微分方程
- B、 微分方程
- C、 线性常系数微分方程
- D、 常系数微分方程
正确答案:C -
第20题:
对()进行拉普拉斯变换,可以得到系统在复数域的数字模型称为传递函数。
- A、线性定常微分方程
- B、非线性微分方程
- C、非线性时变微分方程
- D、线性时变微分方程
正确答案:A -
第21题:
描述线性离散系统运动状态通常用()。
- A、微分方程
- B、传递函数
- C、定常差分方程
- D、信号流图
正确答案:C -
第22题:
动态稳定可分为小扰动动态稳定和大扰动动态稳定,其中小扰动动态稳定是指扰动量足够小,系统可用()状态方程描述的动态稳定过程;大扰动动态稳定是指扰动量大到系统必须用非线性方程来描述的动态稳定过程。
- A、非线性
- B、线性化
- C、常微分
- D、其他三个选项都不是
正确答案:B -
第23题:
单选题描写动态系统的数学模型是()A微分方程
B代数方程组
C常系数线性微分方程组
D以上答案都不对
正确答案: A解析: 暂无解析 -
第24题:
判断题线性微分方程的各项系数为常数时,称为定常系统。A对
B错
正确答案: 错解析: 暂无解析