
itgle.com
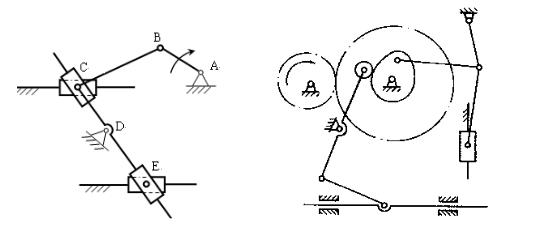
简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。
题目

相似考题
参考答案和解析
即W=F>0。
机构中,n=9,pL=12,pH=1
F=3n-2pL-pH=2=W>0,所以机构运动确定。
C处复合铰链,E处虚约束,F处局部自由度。
略
更多“简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。 <img src="//img.examk.com/exam/y/s/lvNFhCKLugaveneN4FjSHctyNPxFpztQ.jpg">”相关问题
-
第1题:
计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出。

F处为复合铰链,H(或I) 处为虚约束,则
略 -
第2题:
机构具有确定相对运动的条件是:一.运动链的自由度必须大于等于零。 二.机构的原动件的数目必须等于机构的自由度数。
A对
B错
错
略 -
第3题:
指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们是否具有确定的运动。
(1)C点有复合铰链
E点为虚约束
F=3×5-2×7=1
有确定的运动。
(2)图中有一处虚约束,一处复合铰链,一处局部自由度。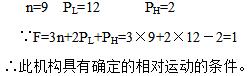
略 -
第4题:
机构具有确定的相对运动条件是原动件数()机构的自由度。
正确答案:等于 -
第5题:
机构的自由度大于零是机构具有确定相对运动的必要条件。
正确答案:错误 -
第6题:
当机构的自由度,且等于原动件数,则该机构具有确定的相对运动。
正确答案:正确 -
第7题:
何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?
正确答案: 复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中, 其某些构件所能产生的局部运动并不影响其他构件的运动, 我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时, K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。 -
第8题:
运动链成为具有确定相对运动的机构的必要条件为:运动链的自由度必须();主动构件数()运动链的自由度。
正确答案:大于零;等于 -
第9题:
填空题机构具有确定相对运动的条件是机构的自由度数目()主动件数目。正确答案: 等于解析: 暂无解析 -
第10题:
单选题机构具有确定相对运动的条件是()。A机构自由度数等于主动件数
B机构自由度数大于主动件数
C机构自由度数小于主动件数
D机构自由度数大于等于主动件数
正确答案: A解析: 暂无解析 -
第11题:
填空题运动链成为具有确定相对运动的机构的必要条件为:运动链的自由度必须();主动构件数()运动链的自由度。正确答案: 大于零,等于解析: 暂无解析 -
第12题:
判断题机构具有确定相对运动的条件是:一.运动链的自由度必须大于等于零。 二.机构的原动件的数目必须等于机构的自由度数。A对
B错
正确答案: 错解析: 暂无解析 -
第13题:
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。

F.3n-2PL-PH=3×6-2×8-1=1
F处为虚约束;B处为复合铰链;G处为局部自由度。
机构运动确定。
略 -
第14题:
计算下列机构的自由度,并指出存在的复合铰链、虚约束或局部自由度。
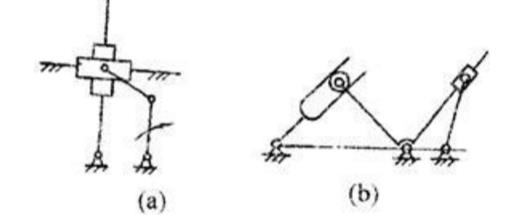
(a)
a中存在复合铰链,5个构件组成复合铰链,共有4个低副。
(b)
b中滚子为局部自由度。
略 -
第15题:
机构具有确定相对运动的条件是:一.运动链的自由度必须大于等于零。 二.机构的原动件的数目必须等于机构的自由度数。
正确答案:错误 -
第16题:
机构具有确定相对运动的条件为:其的自由度>0。
正确答案:错误 -
第17题:
在机构中,某些不影响机构运动传递的重复部分所带入的约束为()。
- A、虚约束
- B、局部自由度
- C、复合铰链
正确答案:A -
第18题:
机构中的复合铰链是指();局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
正确答案:由三个或三个以上构件组成同一回转轴线的转动副 -
第19题:
机构具有确定相对运动的条件是()
- A、机构的自由度数目等于主动件数目
- B、机构的自由度数目大于主动件数目
- C、机构的自由度数目小于主动件数目
- D、机构的自由度数目大于等于主动件数目
正确答案:A -
第20题:
单选题在机构中,某些不影响机构运动传递的重复部分所带入的约束为()A虚约束
B局部自由度
C复合铰链
D真约束
正确答案: D解析: 暂无解析 -
第21题:
单选题机构具有确定相对运动的条件是()。A机构的自由度数目等于主动件数目
B机构的自由度数目大于主动件数目
C机构的自由度数目小于主动件数目
D机构的自由度数目大于等于主动件数目
正确答案: C解析: 暂无解析 -
第22题:
单选题计算平面机构自由度的注意事项包括()A局部自由度
B实约束
C单一铰链
D构件具有不定运动
正确答案: B解析: 暂无解析 -
第23题:
单选题A-2-4-04-3-2、机构具有确定相对运动的条件是()。A机构的自由度数目等于主动件数目
B机构的自由度数目大于主动件数目
C机构的自由度数目小于主动件数目
D机构的自由度数目大于等于主动件数目
正确答案: A解析: 暂无解析







