
itgle.com
4、当操作人员认为工业机器人发生故障时,应优先对工业机器人进行拆卸,以便更详细的了解工业机器人的内部零件状况。
题目
4、当操作人员认为工业机器人发生故障时,应优先对工业机器人进行拆卸,以便更详细的了解工业机器人的内部零件状况。
相似考题
参考答案和解析
更多“4、当操作人员认为工业机器人发生故障时,应优先对工业机器人进行拆卸,以便更详细的了解工业机器人的内部零件状况。”相关问题
-
第1题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.
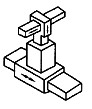
B.
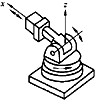
C.

D.
 正确答案:B
正确答案:B
解析:本题考核要点是工业机器人的分类。要求依据给定的图示进行简单判别。球坐标式(代号RRP)又称极坐标式,机器人手臂的运动由一个直线运动和两个转动组成。 -
第2题:
更改工业机器人工具及( )后,工业机器人的移动将随之更改,以便新的TCP到达目标。A.基坐标系
B.世界坐标系
C.工具坐标系
D.工件坐标系
参考答案:C
-
第3题:
工业机器人是指除工业机器人以外的,用于非制造业并服务于人类的各种机器人。()此题为判断题(对,错)。
参考答案:错误
-
第4题:
工业机器人包括______等类型。A.操作型机器人
B.程控型机器人
C.空间机器人
D.学习控制型机器人
参考答案:ABD
-
第5题:
当代机器人大军中最主要的机器人为()。
- A、工业机器人
- B、军用机器人
- C、服务机器人
- D、特种机器人
正确答案:A -
第6题:
工业机器人的机械操作臂各组成机构的作用
正确答案: 1)末端执行器:是直接执行作业任务的装置,大多数末端执行器的结构和尺寸是依据其不同作业任务要求来设计的,从而形成了多种多样的结构形式。根据用途可:机械式夹持器、吸附式末端执行器和专用工具。
2)手腕:手腕是连接末端执行器和手臂的部件,作用是调整或改变末端执行器方位
3)手臂:作用是把物料运送到工作范围内的给定位置上。机器人一般由大臂和小臂组成,其手臂完成伸缩运动、回转、升降或上下摆动运动
4)机座组成:是机器人的基础部分,起支承作用,可分为固定式和移动式两类。固定式用于以机器人为中心的场合。移动式可采用在AGV上设置机器人来实现,用于柔性物流系统物料的传送 -
第7题:
工业机器人按用途可分为装配机器人、焊接机器人、喷涂机器人和搬运机器人等多种。
正确答案:正确 -
第8题:
当代机器人大军中,最主要的机器人为()。
- A、工业机器人
- B、军用机器人
- C、服务机器人
- D、特种机器人
正确答案:A -
第9题:
工业机械手即工业机器人。
正确答案:正确 -
第10题:
对于只进行二维平面作业的工业机器人只需()自由度,若要使操作具有随意的位姿,则工业机器人至少需要六个自由度。而对于回避障碍作业的工业机器人则需要有比()自由度更多的冗余自由度。
正确答案:三个;六个 -
第11题:
多选题工业中最常用的机器人包括()。A喷涂机器人
B焊接机器人
C装配机器人
D搬运机器人
正确答案: A,B,C,D解析: 暂无解析 -
第12题:
判断题工业机械手即工业机器人。A对
B错
正确答案: 错解析: 暂无解析 -
第13题:
工业机器人按用途可分为:( )①装配机器人②焊接机器人;③搬运机器人;④智能机器人;⑤喷涂机器人。A.①②③④
B.①②③⑤
C.①③④⑤
D.②③④⑤
参考答案:B
-
第14题:
机器人既是指代工业机器人。()
参考答案:错误
-
第15题:
从机器人的应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。()此题为判断题(对,错)。
参考答案:正确
-
第16题:
以下哪些机器人被称为最早的工业机器人( )。A.SCARA机器人
B.Unimate机器人
C.Delta机器人
D.Verstran机器人
答案:ABD
-
第17题:
机器人轨迹泛指工业机器人在运动过程中所走过的路径。
正确答案:错误 -
第18题:
工业机器人末端操作器是手部。
正确答案:正确 -
第19题:
用于生产制造的机器人通常被称为工业机器人。
正确答案:正确 -
第20题:
工业机器人按系统功能可分为专用机器人、通用机器人、示教再现机器人、智能机器人。()
正确答案:正确 -
第21题:
工业机器人
正确答案:工业机器人是一种可重复编程的多自由度的自动控制操作机,是涉及机械学、控制技术、传感技术、人工智能、计算机科学等多学科技术为一体的现代制造业的基础设备。 -
第22题:
填空题对于只进行二维平面作业的工业机器人只需()自由度,若要使操作具有随意的位姿,则工业机器人至少需要六个自由度。而对于回避障碍作业的工业机器人则需要有比()自由度更多的冗余自由度。正确答案: 三个,六个解析: 暂无解析 -
第23题:
单选题PUMA是什么类型的机器人()。A拟人机器人
B军事机器人
C工业机器人
D星球探险车
正确答案: C解析: 暂无解析 -
第24题:
多选题常见的工业机器人包括()。A搬运机器人
B喷涂机器人
C焊接机器人
D装配机器人
正确答案: C,B解析: 暂无解析